|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| このページの最終更新日: 2012/02/21
提案日: 2009/09/05 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
クラスコラボ図
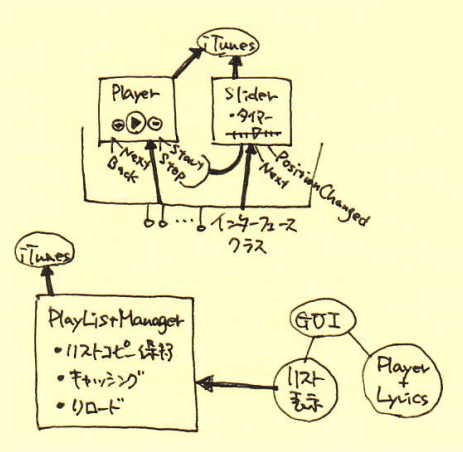
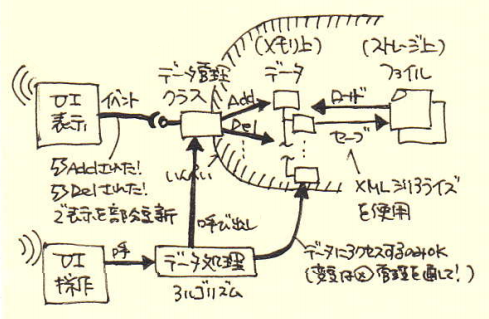
概要 概要文章 次第にクラスの数が増えてくると、クラスの間でお互いがどのように協調し合うのかを図に描いて、一目で全体を把握したくなります。 そこで、クラスコラボ図という新しい図の描き方を提案します。 クラスコラボ図とは、簡単に言うと、四角の中にクラス名を書いてクラスを描き、その間に矢印を描いて、あるクラスから別のクラスの関数を呼び出す動作を矢印で表したものです。これによって、複数のクラスがお互いに協調し合う様子を見える化します。 背景 一目で全体を把握したい 背景文章 別ページ「人に仕事を頼む感覚でクラスを作る」でクラスの作り方について考えました。このページで考えたようにクラスを作っていくと、なるべく単純な機能に分けてクラスを作るので、小さな機能を持ったクラスがたくさん出来ます。これらの小さなクラスがお互い協調して、より大きな機能を実現します。 次第にクラスの数が増えてくると、全体を把握しきれなくなってきます。クラスの間で、お互いがどのように協調し合うのかを図に描いて、一目で全体を把握したくなります。そこで、複数のクラスがお互いに協調し合う様子をクラスコラボ図で表現する、といったアイディアに至りました。本記事では、クラスコラボ図という新しい図の描き方を提案します。 次の2つの図は、クラスコラボ図が誕生する前後に描いた手書きの図です。左の図は、クラスコラボ図になりかけている前身の図です。右の図は、初めてクラスコラボ図を描いたときの図です。
クラスの関連性を見れば、コードが分かる?
自分で作ったクラスを上位層でどのように使っているかを把握したい。 どんなもの? クラスがお互いに協調し合う様子を見える化する 方法文章 クラスコラボ図とは、簡単に言うと、次の図に示すように、四角の中にクラス名を書いてクラスを描き、その間に矢印を描いて、あるクラスから別のクラスの関数を呼び出す動作を矢印で表したものです。これによって、複数のクラスがお互いに協調し合う様子を見える化します。
クラスコラボ図は、次の図に示すように、クラスの他にも、ファイルやデータベースなどを描いて、クラスがストレージへアクセスする様子を表すことが出来ます。
さらに、クラスコラボ図は、次の図に示すように、関数呼び出しの他にも、イベントの矢印と、プロパティ値の読み取りの矢印を描くことが出来ます。イベントの矢印は、白丸とそれを受けるような半円を描いて、イベントの発生を受け取る様子を表します。次の図の例では、ClassName1が公開するイベントにClassName2が登録して、ClassName2がClassName1のイベントを受け取る様子を表します。プロパティ値の読み取りの矢印は、先頭に反対向きの矢印を描いて、プロパティ値を参照して読み取る様子を表します。次の図の例では、ClassName2がClassName3のプロパティを読み取る様子を表します。
クラスコラボ図は、基本的には、四角形と、その間をつなぐ線から成る図なので、ノード/エッジ型のグラフの1つと言えます。ノードとエッジには、それぞれ次のような項目を描くことが出来ます。 ノードには :
エッジには :
このようにクラスコラボ図を見れば、複数あるクラスのそれぞれがお互いにどのように関係するか(相互関係)が分かり、プログラム全体の構成が分かるようになります。クラスコラボ図は、複数のクラスがお互いにコラボレーションする方法を見える化します。
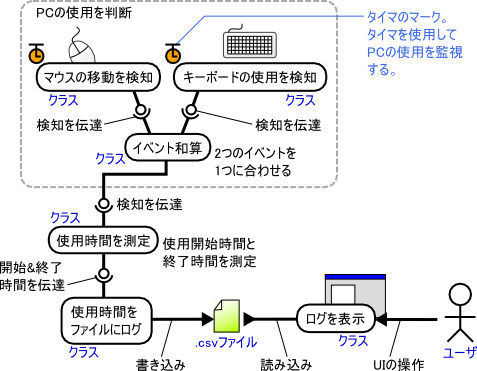
ここでは、実際にどのようにクラスコラボ図を使うのかについて、例を使って説明します。例えば、PCの使用時間をログするソフトを考えます。このソフトは、マウスの移動やキーボードのタイピングを検知して、その情報を基にユーザーがPCを使用していた時間を測定し、その結果をファイルに保存します。このソフトの中身をクラスコラボ図で表現すると、例えば、次の図のようになります。
大まかに図を眺めると、ソフトの中には複数のクラスがあり、それぞれのクラスの間で何らかの影響を及ぼし合う様子が分かります。このように、クラスコラボ図は、クラスをどのように使ってソフトの機能を実現するか、を表す場合に使用します。上の図を詳しく見ていくと、次のようなことが読み取れます。
クラスコラボ図を見れば、ソフトの機能を実現するために、どのようなクラスがどのようにコラボレーションするのかが分かります。クラスコラボ図を使えば、このようにソフトの中身を分かりやすく表すことが出来ます。 新しく出てきたマークや書き方 前述したPCの使用時間をログするクラスコラボ図の例で、新しく出てきたマークや書き方が3つあります。これらを次に説明します。
クラスコラボ図から分かること 前述のクラスコラボ図の利用例では、PCの使用時間をログする例を使って、どのようにクラスコラボ図を使うのかを説明しました。ここでは、同じ例を使って、クラスコラボ図からどんなことが分かるのかに注目します。もう一度、前述と同じ次の図を見ます。
クラスコラボ図から分かることは、主に次の3つです。以降の節で詳しく説明します。 クラスコラボ図にある、四角の中の言葉を見ることで、ソフトの中にはどんな機能を持ったクラスがあるか、といったことが分かります。各クラスが持つ機能を見ることで、最終的にソフトで達成したい大きな機能をどのように小さく分割して、それらの小さな機能をどのようにクラスに割り当てるのか、といったことが分かります。
上の図の例では、例えば、ソフトの中にはマウスの移動だけを専門に検知する「マウスの移動を検知」クラスがあることが分かります。このように各クラスが持つ機能を見ていくと、このソフトは、PCの使用時間をログするといった大きな機能を6つの機能に分割して、それらを6つのクラスに割り当てることでソフトを実現していることが分かります。 このようにクラスコラボ図を見ることで、そのクラスはどんな仕事を担当し、どんな責務を果たすのかが分かります。他のクラスと責務の範囲を見比べることで、そのクラスに与えられた責務が他のクラスとどのように分離されているか、責務の分離の様子が分かります。 クラスコラボ図にある、矢印でつながった2つのクラスを見ることで、どのクラスからどのクラスにどんな情報を伝達するか、といったことが分かります。また、2つのクラスの間にある矢印の種類を見ることで、どのような方法で情報を伝達するのか、といったことが分かります。
上の図の例では、例えば、「マウスの移動を検知」クラスと「イベント和算」クラスの間にある矢印を見ると、「マウスの移動を検知」クラスから「イベント和算」クラスに、検知した瞬間のタイミング情報を伝達することが分かります。間にある矢印の種類を見ると、イベントの発行と受け取りの仕組みで情報を伝達することが分かります。 このようにクラスコラボ図を見ることで、そのクラスが持つインターフェースが分かります。そのクラスがどんな関数を持っていて、どんなプロパティ値を持っているか、どんなイベントを発行するかといった、そのクラスが外部に対してどのようなインターフェースを公開するのかが視覚的に分かります。 クラスコラボ図にある、矢印をさかのぼっていくことで、そのクラスは他のどのクラスに頼っているか、といったことが分かります。また、矢印に付いた文字を見ることで、そのクラスは他のクラスに何を頼っているかが分かります。
上の図の例では、例えば、「使用時間をファイルにログ」クラスを見ると、このクラスは自分1人だけで処理が完結するわけではなく、「使用時間を測定」クラスから与えられる開始&終了時間の情報が必要です。「使用時間をファイルにログ」クラスは「使用時間を測定」クラスに、開始&終了時間の情報を頼っていることが分かります。 このようにクラスコラボ図を見ることで、クラス間の依存関係が分かります。そのクラスがどのクラスに何を依存しているのかが視覚的に分かります。また、矢印の数を見ることで、そのクラスが他のクラスにどれぐらい依存しているのかといった、依存度が分かります。
矢印の線がクロスする場合 クラスコラボ図に細かいコラボレーションまで忠実に描こうとすると、かなりたくさんの矢印が必要になることがあります。このように描く矢印の数が増えてくると、クラスコラボ図は2Dの図なので、どうしても矢印の線がクロスします。たくさんの矢印がクロスすると、クラスコラボ図が分かりにくくなります。 たくさんの矢印がある場合は、通常、メインの関係を表す重要な矢印と、そうではない矢印に分けることが出来ます。このうち、重要な矢印は、矢印がクロスしてもそのまま矢印を描いて、しっかりコラボレーションを表現すべきです。一方、重要でない矢印は、矢印がクロスするなら線を引かない方が見やすくなります。 そこで、クラスのクローンを作ることで、重要でない矢印の線をクロスしないように出来ます。下にある左図は矢印がクロスする場合で、右図がクローンを作ってクロスを回避した場合です。 クローンでクロスを回避するには、まず、図の「CA」のようにクラスに適当な識別子を付けます。次に、その識別子だけをコピーして、同じクラスを表す小さなクローン「CA」を作ります。作ったクローンを矢印の結びやすい位置に配置して、クローンと矢印を結びます。このように、クラスと矢印を結ぶ代わりに、クラスのクローンと矢印を結ぶことで、矢印がクロスするのを防ぎます。
クローンはいくつでも作れます。矢印がクロスして困る場合は、すべてクラスのクローンを作ってクロスを回避します。
クラスの機能構成/コラボ方法だけを分離 プログラムには色々な要素が含まれています。多くの要素が複雑に絡み合って混在すると、プログラムが分かりにくくなります。このように要素が混在するときは、多くの場合、その中からある側面だけを分離して表現することで、プログラムを分かりやすく出来ます。 クラスコラボ図は、プログラムに混在する要素のうち、クラスの機能構成/コラボ方法だけを分離して描いたものです。分離して機能構成/コラボ方法の側面だけに注目することで、プログラムを理解しやすくします。ここで、クラスの機能構成/コラボ方法とは、次のようなものです。
そのため、クラスコラボ図には機能構成/コラボ方法だけを描くようにします。クラスコラボ図に、これ以外の他の要素を混在して描いてはいけません。分離して描いた意味がなくなってしまいます。 例えば、クラスコラボ図に実装方法/アルゴリズムの情報を描いてはいけません。クラスの中で具体的にどのような処理を行うのか、どのような順序で処理が進み、どのようにデータが流れていくのか、といった実装内部の情報は描かないようにします。クラスコラボ図は、このような実装内部を切り離して、機能構成/コラボ方法だけを抽出することで、複雑なプログラムをより簡単に表現します。 クラスコラボ図を見れば、インターフェースに関する部分のコードを作ることが出来ます。どのような名前のクラスを作って、そのクラスの中にどのような名前/型の関数/プロパティ値を作るか、といった外枠の部分(インターフェース)は、クラスコラボ図を見ながらコードに書くことが出来ます。一方、関数の中に書くプログラム(実装内部)は、クラスコラボ図を見ても作ることは出来ません。 言い換えれば、クラスコラボ図はプログラムの中の機能構成/コラボ方法という一面しか表現しないということです。クラスコラボ図を見ても、実装方法/アルゴリズムは分かりません。このように他の要素を全て切り捨てることで、クラスコラボ図は、機能構成/コラボ方法の一面について分かりやすく表現します。
クラス内部の動作が表せなくてもクラスの挙動は表現できる 前述したように、 クラスコラボ図には実装方法/アルゴリズムの情報を描いてはいけません。 そのため、クラスコラボ図ではクラス内部の動作を表すことが出来ません。 しかし、クラス内部の動作を表さなくても、各クラスの持つ機能がそれぞれ小さければ、クラスコラボ図だけでクラスの挙動は十分詳細に表現できます。クラスの機能が小さければ、クラス内部の動作が単純になり、処理の内容が少なくなるので、クラス名や関数名から簡単に内部動作の処理内容が分かります。クラス内部の動作を表さなくても、クラス名や関数名から動作の内容が分かるので、クラスの挙動は十分詳細に表現できます。 別ページ「人に仕事を頼む感覚でクラスを作る」で考えたようにクラスを作っていくと、なるべく単純な機能に分けてクラスを作ることが出来ます。この方法でクラスを作ることで、各クラスの持つ機能をなるべく小さくし、クラスコラボ図で全体の挙動を分かりやすく表現できるようになります。
図に描き出して毎回図を見る方が効率的 プログラムを作る中で、クラスの機能構成/コラボ方法を考えたいときに、関連するクラスの数が5つを超えてくると、コードの上で考えるより、図に描き出して毎回図を見る方が効率的です。コードの上で考えようとすると、結局、コードを見ながら頭の中で考えることになります。クラスの数が少ないうちは、これで間に合いますが、数が5つを超えてくると、頭の中だけでは手に負えなくなってきます。 そのため、クラスコラボ図を描いて、その図の上で考えます。図に描けるものは図に描き出して、頭で考える負担を減らします。代わりに、頭ではもっとクリエイティブなことを考えるのに集中できます。頭の負担を減らして、毎回図を見る方が楽になります。
クラスコラボ図では表せないこと 前述のように、クラスコラボ図は、プログラムに混在する要素のうち、クラスの機能構成/コラボ方法だけを分離して描いたものです。しかし、クラスの機能構成/コラボ方法であっても、クラスコラボ図では表せなかったり、表しにくい場合があります。それらは、主に次に挙げるケースです。 以降の節で詳しく説明します。 協調動作の形が時間と共に変わるケースは、1つのクラスコラボ図で表せません。例えば、次の図のように、あるときは左図のような形でお互いのクラスが協調動作をして、また、あるときは右図のような形で協調動作をする場合を考えます。このように、時間と共にクラス間を結ぶ矢印が変わる(協調動作の形が変わる)と、その個々のケースに対して1つずつクラスコラボ図を描くことは出来ますが、これらを1つのクラスコラボ図で一度に表すことは出来ません。
このように、時間と共に協調動作の形が変わる動的なコラボレーションの様子は、1つのクラスコラボ図で表せません。クラスコラボ図は、ある瞬間で止めたときの静的なコラボレーションの様子を表すものです。 動的なコラボレーションは、例えば、次のような場面でよく見られます。
クラスコラボ図で動的なコラボレーションの様子を表したい場合は、個々の瞬間に対して1つずつ、必要な数だけクラスコラボ図を描いて、複数のクラスコラボ図を用いることで対応します。
前述のように、クラスコラボ図は、静的なコラボレーションの様子を表すもので、これはすなわち、ある1種類のコラボレーションの様子を表すものです。そのため、複数パターンあるコラボレーションは、そのすべてを1つのクラスコラボ図で表せません。 複数パターンあるコラボレーションは、例えば、汎用的なクラスを説明したい場面でよく見られます。汎用的なクラスは、ライブラリにあるような汎用的に利用できるクラスで、例えば、.Netライブラリの場合、IO(入出力)関係の次のようなクラスがあります。
これらのクラスの使い方を説明したい場合、どのクラスをどのように組み合わせて使うか、その組み合わせ方はいろいろと考えられます。FileStreamをBinaryReaderに代入してBinaryReaderの関数からデータを読んだり、FileStreamをStringReaderに代入してStringReaderの関数からデータを読んだりと、組み合わせ方(コラボレーションの方法)が複数パターンあります。このように、複数パターンあるコラボレーションは、1つのクラスコラボ図で表せません。 このコラボレーションをなるべく少ないクラスコラボ図で表すと、次の2つの図のようになります。BinaryReaderやStringReaderに代入できるクラスは、Streamクラスを継承するクラスなので、コラボレーションは継承元のStreamにアクセスする形で表現しました。FileStreamとMemoryStreamはStreamを継承するので、UMLのクラス図にある継承の矢印を使って表現します。このように、継承関係の表現を使うことで、FileStreamとMemoryStreamの2パターンある組み合わせを1つにまとめて表すことが出来ます。
もう1つの例を挙げます。.Netライブラリの場合、コレクション関係の次のようなクラスがあります。
ListやDictionaryは非常に汎用的なクラスです。あらゆる場面で頻繁に利用されます。使い方は千差万別で、クラスの組み合わせ方に多くのパターンがあります。さらに、List<T>のようにジェネリクスなので、ジェネリクス<T>に他のいろいろなクラスを指定して型を拡張できます。これによって、さらに多くのパターンがあります。 ListやDictionaryのように、柔軟に組み合わせ可能な自由度の高いクラスは、そのクラスにいくつもある使い方のすべてを、クラスコラボ図で一度に表せません。そのため、クラスコラボ図では、そのクラスが潜在的に持つすべての機能を一度にまとめて表現することが出来ません。 このように、クラスコラボ図では、使い方(組み合わせ方=コラボレーション方法)のすべてを一度に表せません。しかし、その一例あれば、個別に表すことが出来ます。なので、クラスコラボ図で複数パターンあるコラボレーションを表したい場合は、個々のパターンに対して1つずつ、必要な数だけクラスコラボ図を描いて、複数のクラスコラボ図を用いることで対応します。
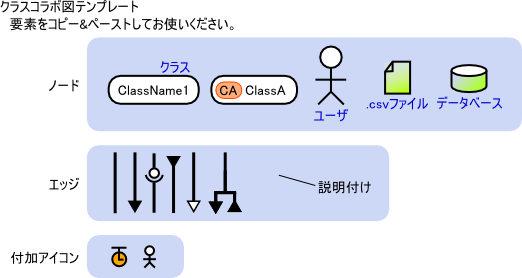
クラスコラボ図は2Dの図です。そのため、1つの図の中に大量のクラスや矢印を描くことは出来ません。実際に描けるクラスや矢印の数には、限界があります。分かりやすいクラスコラボ図にするには、1つのクラスにつながる矢印の数を、多くても5±2個程度までに抑える必要があります。 クラスコラボ図を描いたときに、1つのクラスにつながる矢印の数が7個以上と多くなってしまう場合は、そのクラスの設計が悪いのかもしれません。通常、1つのクラスが持つ機能は、小さければ小さいほどよいと言われます。クラスが多くの機能を持っていると、クラスに多くの矢印がつながる傾向があります。 そこで、クラスが持つ機能をより小さく分割して、複数のクラスに機能を分けます。これによって、クラスの数は増えますが、1つのクラスが持つ機能は小さくなります。これをクラスコラボ図に描いてみると、自然に矢印の数が減る場合が多くあります。このように、クラスコラボ図が複雑になってしまう場合は、クラスの設計を見直すのも1つの方法です。 しかし、それでもなお、クラスにつながる矢印の数が多くなる場合があります。矢印の数が多くて、クラスコラボ図が分かりにくい場合は、描く内容をいくつかに分けて、複数のクラスコラボ図を描くことで対応します。必要な部分だけを抜き出したり、注目する視点を変えたりして、描く内容を分けます。そして、それらを別々のクラスコラボ図で表現します。 テンプレートダウンロード クラスコラボ図のテンプレートをダウンロードできます。.svg形式のファイルです。.svg形式はChrome (汎用のブラウザ、フリー)などで表示でき、Inkscape (ベクター画像編集ソフト、フリー)などで編集できます。 class_collabo_template.svg [26.3KB] ダウンロードしたテンプレートの内容は、次に示す図のようになります。テンプレートには、クラスコラボ図を描くのに必要な代表的な部品が揃えてありますので、必要な部品を適宜、コピー&ペーストして、自身のクラスコラボ図作成にご活用ください。
テンプレートには、次の3種類の部品、ノード、エッジ、付加アイコンがあります。ノードを配置して、その間をエッジでつなげることで、クラスコラボ図を作っていきます。付加アイコンは、ノードの左上などに付加して、ノードの情報を補完します。クラスコラボ図の例は「クラスコラボ図の利用例」の節をご覧ください。
UMLでの代用 UMLを使ってクラスコラボ図を描きたい場合は、簡易的にクラス図を使って描くことが出来ます。また、アクティビティ図やステートマシン図を代用して描くことも出来ます。例えば、これら3つのUMLを使って、簡単なクラスコラボ図を描くと、次の図のようになります。代用してクラスコラボ図を描く場合、本来の意味とは異なるUMLの使い方をして、クラスコラボ図を描くことになります。
このようにUMLを代用してクラスコラボ図を描くことは可能ですが、描ける図は限られてしまいます。クラスコラボ図を描くには、次の図のような矢印が必要です。しかし、UMLには3、4、6番の矢印がありません。そのため、表現できる範囲が限られてしまいます。
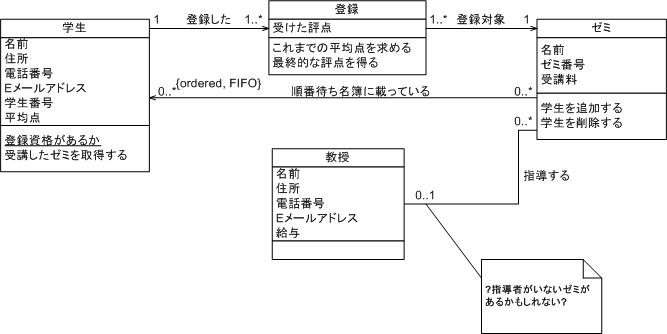
UMLではアクティビティ図やステートマシン図で簡易的に代用できます。 世の中の似た機能 現状文章 (同じこと、似たことがされている場合のみ) 本記事で提案したクラスコラボ図は、UMLのコミュニケーション図(共通の目的を協調して達成する複数のオブジェクトの振る舞いを描く)や、クラス図(システムの静的な(時間によって変わらない)関係をモデリングする)などに似ています。下の図は、コミュニケーション図とクラス図の一例です。
コミュニケーション図は、あるオブジェクトから他のオブジェクトの関数を呼び出したり、その結果を受け取ったりする振る舞いの様子を、上の左図のような矢印で描きます。複数のオブジェクトの間で行われるメッセージのやり取りを描きます。 クラスコラボ図は、コミュニケーション図の描き方をベースにしており、最もよく似ています。コミュニケーション図と違う点は、主に次の3種類の矢印、関数の呼び出し矢印、イベントの受け取り矢印、プロパティ値の読み取り矢印を使って、お互いのクラスがどのように作用し合うかを表します。このように、クラスコラボ図は協調し合う様子を、さまざまな矢印を使ってより具体的に表現しようとします。もし、新しい協調方法の考え方が出てきたときには、その協調方法を表す新しい矢印を積極的に作って、新しい協調方法を明確に表現しようとします。 クラス図は、クラスの間にある静的な(時間によって変わらない)関係を、上の右図のような線と矢印で描きます。クラスコラボ図では、クラス図の描き方のうち、継承/インターフェースの描き方を部分的に取り入れて、継承/インターフェースの関係を合わせて描きます。
※ご意見、ご感想、改善点、その他の情報などがありましたら、メールにてお知らせ願います。 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
















{kind=link}